LAB 10 - MAE4190 FAST ROBOTS
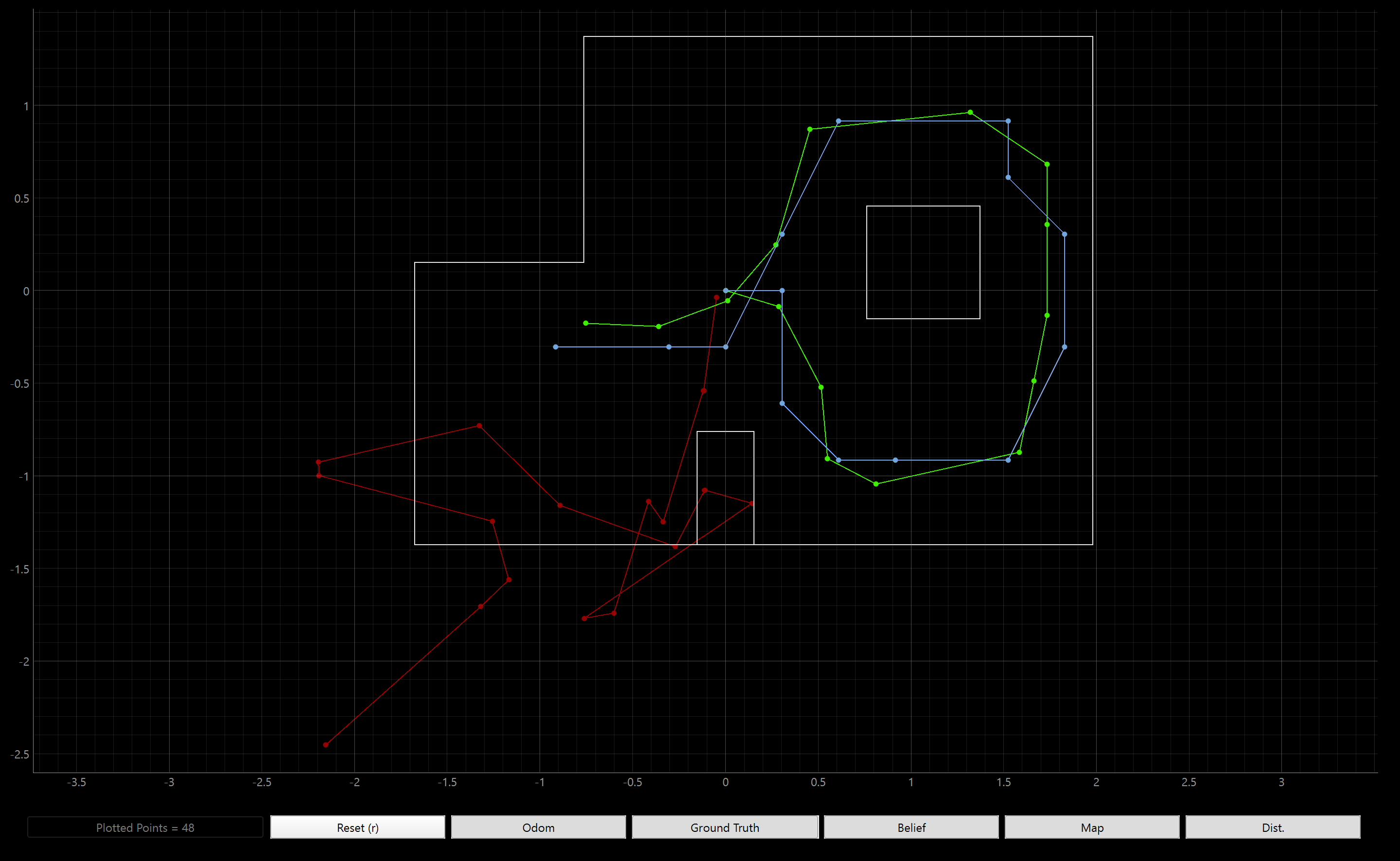
This is lab 10 of fast robots. In this lab, we are implementing grid localization using the Bayes Filter. We are using a simulator that will plot the ground truth, odometry and belief of the locations of the car.
Implementing the Functions
compute_control
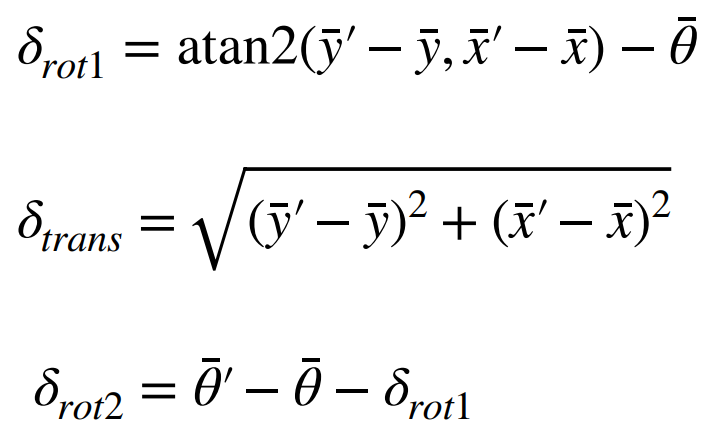
I extract the needed information from the given data and calculate the odomoetry model parameters from the equations we learned during lecture:
def compute_control(cur_pose, prev_pose):
...
delta_rot_1 = np.arctan2( (cur_y - prev_y), (cur_x - prev_x) ) - prev_yaw
delta_trans = np.sqrt( (cur_y - prev_y)**2 + (cur_x - prev_x)**2 )
delta_rot_2 = cur_yaw - prev_yaw - delta_rot_1
#normalize the two angles
delta_rot_1 = mapper.normalize_angle(delta_rot_1)
delta_rot_2 = mapper.normalize_angle(delta_rot_2)
return delta_rot_1, delta_trans, delta_rot_2
odom_motion_model
For each of the rotations and translational motions of the pose, we use Gaussians to model their changes and compare the predicted control state to what the robot is actually doing. The compute_control function is used here to compare the pose to the given u.
def odom_motion_model(cur_pose, prev_pose, u):
...
rot1 = u[0]
trans = u[1]
rot2 = u[2]
rot1_hat, trans_hat, rot2_hat = compute_control(cur_pose, prev_pose)
#Returns the relative likelihood of x in a Normal Distribution with mean mu and standard deviation sigma.
prob = loc.gaussian(mapper.normalize_angle(rot1_hat - rot1),0, loc.odom_rot_sigma) * loc.gaussian(trans_hat-trans, 0, loc.odom_trans_sigma) * loc.gaussian(mapper.normalize_angle(rot2_hat-rot2), 0, loc.odom_rot_sigma)
return prob
prediction_step
The prediction step of the Bayes Filter needs to take the belief distributions of the robot’s every previous step, propagate them through the motion model, and combine them to give a belief distribution of where the robot’s next state will be.

def prediction_step(cur_odom, prev_odom):
...
u = compute_control(cur_odom, prev_odom);
loc.bel_bar = np.zeros((mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A))
for px in range(mapper.MAX_CELLS_X):
for py in range(mapper.MAX_CELLS_Y):
for pa in range(mapper.MAX_CELLS_A):
prev_pose = mapper.from_map(px, py, pa)
for cx in range(mapper.MAX_CELLS_X):
for cy in range(mapper.MAX_CELLS_Y):
for ca in range(mapper.MAX_CELLS_A):
curr_pose = mapper.from_map(cx, cy, ca)
prob = odom_motion_model(curr_pose, prev_pose, u)
loc.bel_bar[cx, cy, ca] += prob * loc.bel[px, py, pa]
#normalize
loc.bel_bar /= np.sum(loc.bel_bar)
sensor_model and update_step
| The sensor model function is the equivalent of calculating p(z | x). It models the measurement noise, which is used for the update step in the Bayes Filter. |
def sensor_model(obs):
prob_array = loc.gaussian(loc.obs_range_data.flatten(), obs, loc.sensor_sigma)
return prob_array
def update_step():
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
"""
likelihood = np.prod(sensor_model(mapper.obs_views),axis=3)
loc.bel = likelihood * loc.bel_bar
#normalize
loc.bel /= np.sum(loc.bel)