LAB 5 - MAE4190 FAST ROBOTS
Welcome to lab 5 of fast robots! In this lab we will be implementing linear PID control on our car. The goal of this lab is for the car to be able to stop about 1 ft (305mm) away from a wall, regardless of starting position and any disturbances.
Prelab
In order to simply the debugging process, I made three Arduino to BLE commands: starting the PID control, stopping PID controls, sending data from PID run.
/*
* Allow car to be turned on via bluetooth
*/
case START_CONTROL:
float set_Kp, set_Kd, set_Ki, set_dis;
robot_cmd.get_next_value(set_Kp);
robot_cmd.get_next_value(set_Kd);
robot_cmd.get_next_value(set_Ki);
robot_cmd.get_next_value(set_dis);
Kp = set_Kp;
Kd = set_Kd;
Ki = set_Ki;
target_dis = set_dis;
tindex = 0;
integral = 0;
prev_error = 0;
start_PID = true;
break;
I wanted to be able to change the PID parameter values easily without burning the code on the board every time, hence they will be obtained from the python BLE input.
case STOP_CONTROL:
start_PID = false;
control_stop();
Serial.println("PID stopped");
break;
Aside from the stopping protocol over BLE, I also implemented a hardstop that sets all PWM signals to 0 if the while (central.connected()) loop ends, meaning that the Artemis board has disconnected from bluetooth.
case SEND_PID_DATA:
for (int tindex = 0; tindex < tindex_max; tindex++){
tx_estring_value.clear();
//send time data
tx_estring_value.append((float)time_doc[tindex]);
tx_estring_value.append(",");
//send distance data
tx_estring_value.append((float)distance_doc[tindex]);
tx_estring_value.append(",");
//send error
tx_estring_value.append((float)error_doc[tindex]);
tx_estring_value.append(",");
//send motor input
tx_estring_value.append((float)motor_input[tindex]);
tx_estring_value.append(",");
//send PID input
tx_estring_value.append((float)PID_doc[tindex]);
tx_estring_value.append(",");
//tof freq
tx_estring_value.append((float)tof_interval[tindex]);
tx_estring_value.append(",");
tx_characteristic_string.writeValue(tx_estring_value.c_str());
delay(1000);
}
break;
This is the code for the receiving end on Python.
time_array = []
dist_array = []
error_array = []
motor_array = []
PID_array = []
tof_freq = []
def notifyBle(uuid, data):
data = data.decode()
parts = data.split(",")
time_array.append(float(parts[0]))
dist_array.append(float(parts[1]))
error_array.append(float(parts[2]))
motor_array.append(float(parts[3]))
PID_array.append(float(parts[4]))
tof_freq.append(float(parts[5]))
ble.send_command(CMD.START_CONTROL, "0.06|0.02|0|305")
#Kp|Kd|Ki|target_dis
print("car started")
time.sleep(30)
ble.send_command(CMD.STOP_CONTROL, "")
print("car stopped")
time.sleep(5)
ble.send_command(CMD.SEND_PID_DATA, "")
print("data got")
Lab Procedure
Position Control
To implement position control, there are three parameters Kp, Kd and Ki to be considered. The equation to calculate the motor inputs from feedback control is as follows:
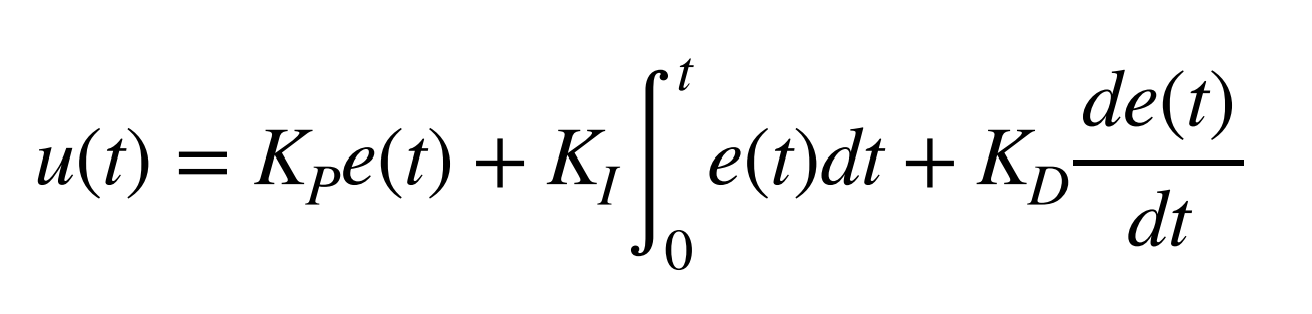
I decided to start with a PID controller as it gives me more flexibility in achieving the best results, able to reduce oscillations or overshoot. If I find that a certain type of control is not benefitting the car’s performance much, I can always set that gain to 0.
Kp control:
I started out with only proportional control for initial testing, starting Kp at around 0.05 to try with a relatively mild controller.

The car ran fairly reliably. I tried to go lower and higher to explore the boundaries of a viable Kp. On the lower end, there was not much point in placing the Kp value lower than 0.04, as after that the values of the motor inputs are all capped at the lower limit of 40.
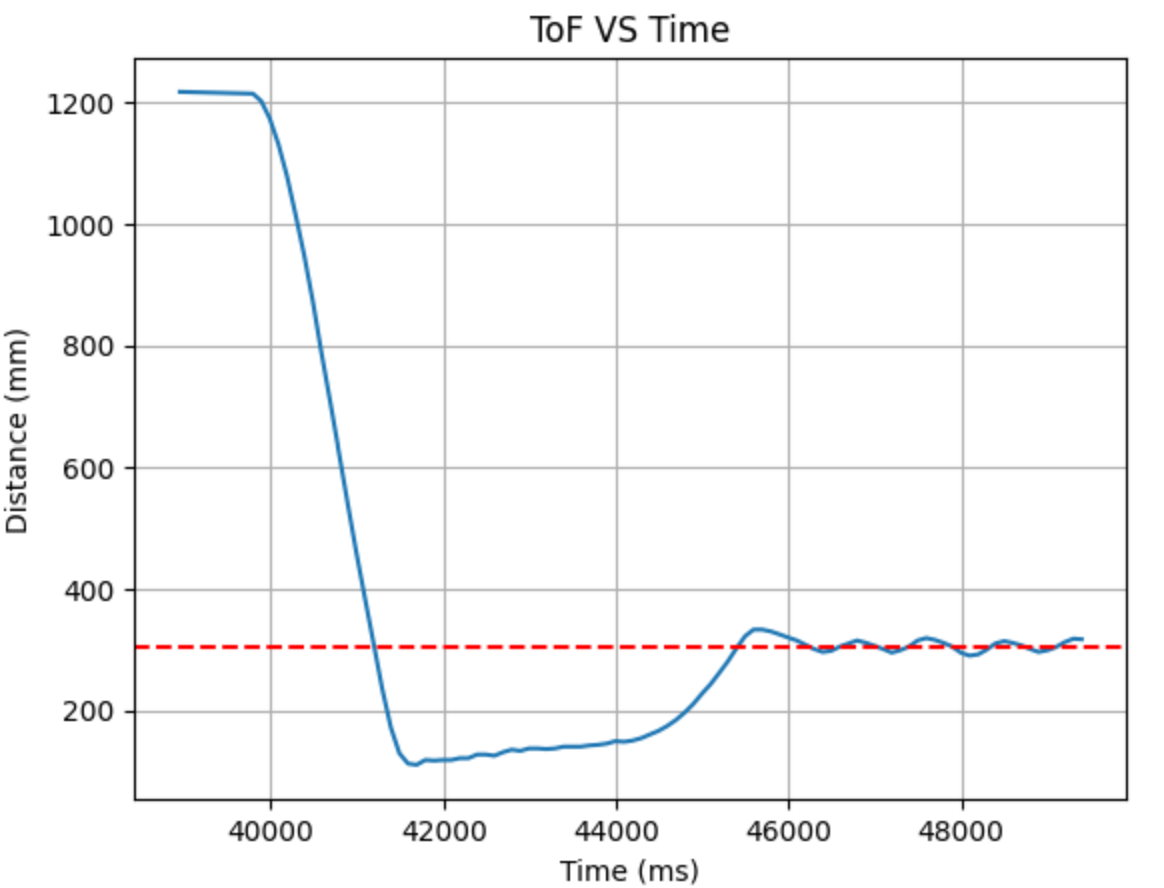
0.09 is about the largest I can make Kp without the car hitting the wall. As we can see the overshoot is much larger and it takes a lot longer to recover and oscillate around the desired location.

Since the 0.05 controller is about right for accuracy, but a little weak for textured floor, I chose Kp = 0.06.
Kd control:
As my car had a little overshoot, I added Kd next to reduce this. I started with 0.1, but this was too aggressive and my car ran into the wall. Unfortunately at this point my ToF sensor broke and when .getDistance() was run returns one constant distance value. I had to switch to my other sensor.
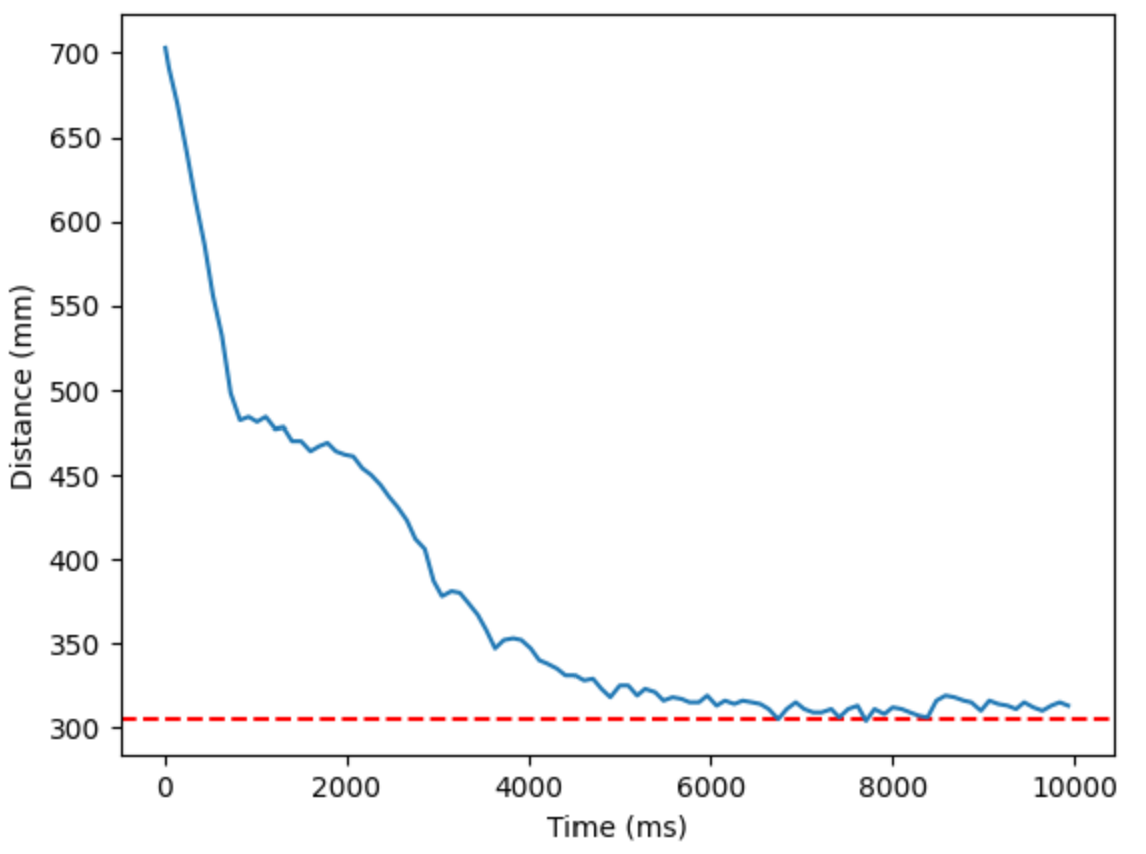
I tried again with Kd = 0.05, and this time it was about right. From the distance vs time graph, it improved the overshoot significantly, but now resulted in a steady state error, which we will fix with Ki.
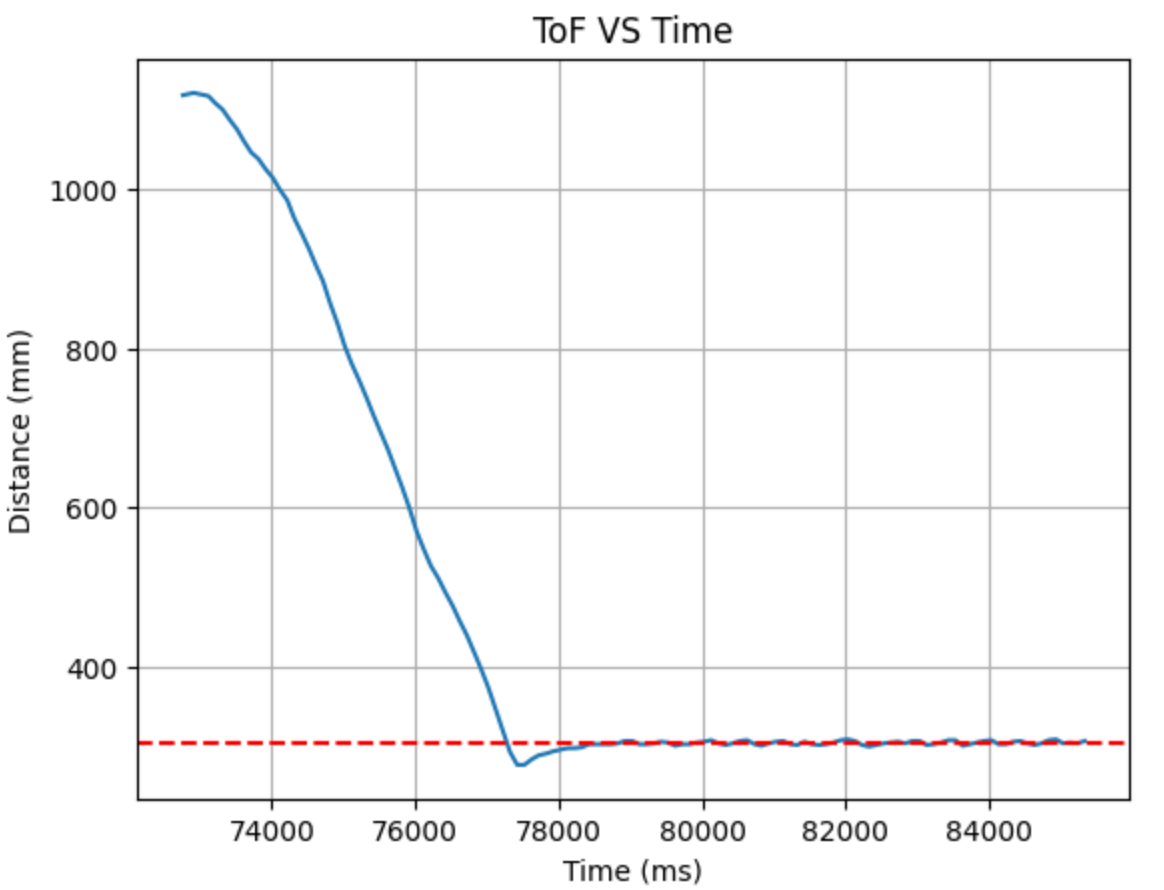
Ki control:
I quickly learned that I needed a very small value for Ki as well as an anti-wind-up implemented into my code, as my car became unstable. It overshot a lot, crashing into the wall, and had stronger oscillations about the required distance:

The modification in code:
integral = constrain(integral, -300, 300);
I ended up with Ki = 0.0001.
Code for PID:
PIDResult PID_calculation(float distance)
{
unsigned long curr_time = millis();
float dt = (curr_time - prev_time)/1000.0;
prev_time = curr_time;
//calculate error for proportional
float curr_error = distance - target_dis;
//calculate integral term
integral += curr_error * dt;
//anti-wind up
integral = constrain(integral, -300, 300); //change this when Ki is decided
//calculate derivative term
derivative = (curr_error - prev_error)/dt;
prev_error = curr_error;
//calculate PID
float u = Kp * curr_error + Ki * integral + Kd * derivative;
PIDResult r;
r.u_r = u;
r.error_r = curr_error;
r.time_r = curr_time;
return r;
}
Motor code:
void PID_forward(float PID_u, int i){
float adj_speed = PID_u * 1.4; //adjusted for the weaker motor
float norm_speed = PID_u;
//make sure it doesn't go below the deadband or exceed the max PWM signal
adj_speed = constrain(adj_speed, 40, 255); //40 to give it some cushion from the actual lowest value, make sure it actually moves the car
norm_speed = constrain(norm_speed, 40, 255);
analogWrite(MOTOR1PIN1, adj_speed);
analogWrite(MOTOR2PIN1, norm_speed);
analogWrite(MOTOR1PIN2, 0);
analogWrite(MOTOR2PIN2, 0);
motor_input[i] = adj_speed;
}
void PID_backward(float PID_u, int i){
float adj_speed = abs(PID_u) * 1.4; //adjusted for the weaker motor
float norm_speed = abs(PID_u);
//make sure it doesn't go below the deadband or exceed the max PWM signal
adj_speed = constrain(adj_speed, 40, 255); //40 to give it some cushion from the actual lowest value, make sure it actually moves the car
norm_speed = constrain(norm_speed, 40, 255);
analogWrite(MOTOR1PIN1, 0);
analogWrite(MOTOR2PIN1, 0);
analogWrite(MOTOR1PIN2, adj_speed);
analogWrite(MOTOR2PIN2, norm_speed);
motor_input[i] = adj_speed;
}

This is the final performance of my car with the given PID parameters. In the video it demonstrates that it stops about 1 ft from the wall, and when I shift it further away or closer, it is able to recover back to about 1 ft.
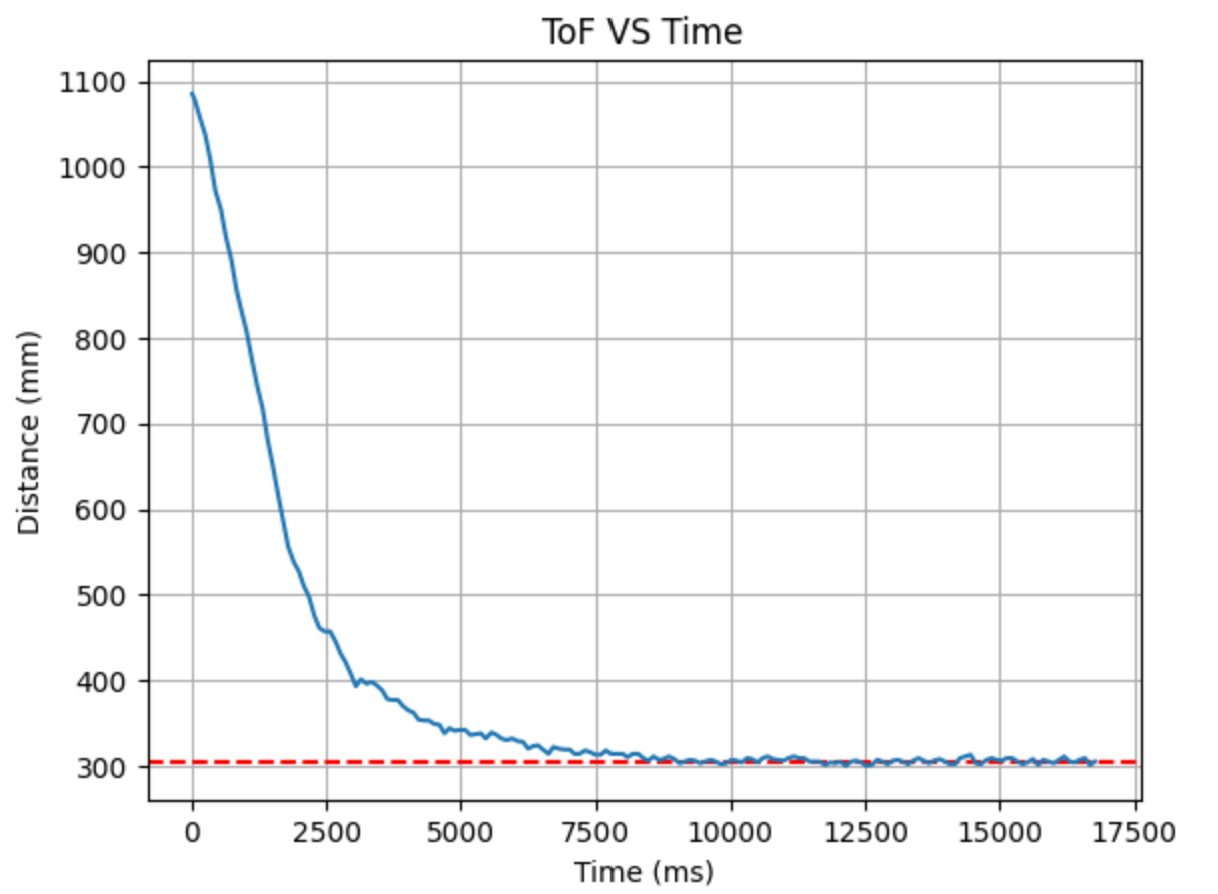
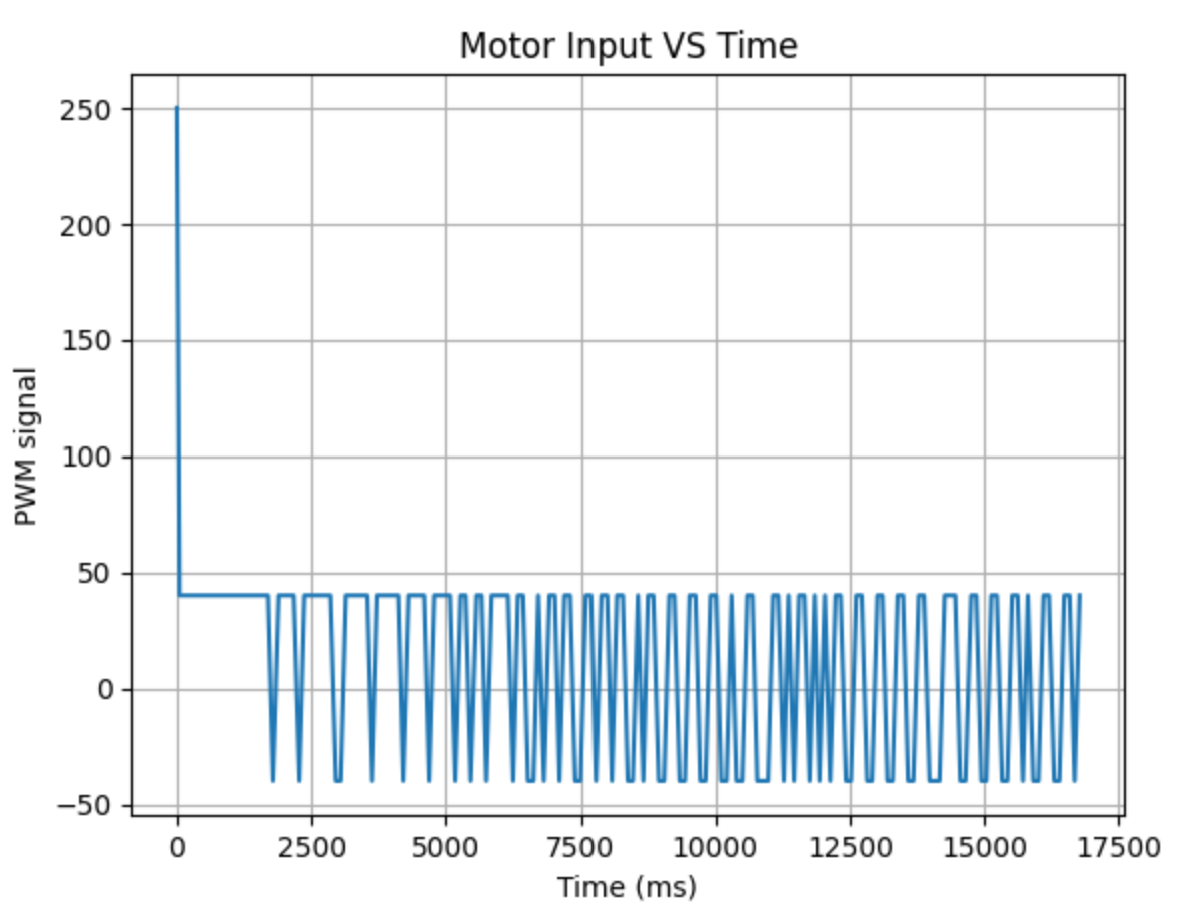
These are the final ToF sensor outputs and the motor inputs of my PID controls. The motor inputs look a little strange due to the relatively gentle controls producing inputs that are manually constrained to have magnitudes higher than 40. Hence the motor controls keep spiking back and forwards as it performs fine adjustments to rearrange itself back into the 305mm position.
Extrapolation
In order to get a faster responding car, we need to eliminate the limitations of the loops running by the ToF sampling frequency.
//Testing for ToF sampling frequency
prev_sensor_time = millis();
tof_interval[tindex] = dt_ex;
The ToF sensors return data in around on average 97ms intervals. To decouple the PID loop frequency from the ToF sensor frequency, we need to perform extrapolation of the existing data in between each sensor reading, giving us a guess of where the car is and executing the PID commands based on this prediction.
else{
distanceSensor2.clearInterrupt();
float ex_dist = prev_dist + d_dist/dt_ex * (millis()-prev_sensor_time);
PIDResult r = PID_calculation(ex_dist);
prev_dist = ex_dist;
float u_store = r.u_r;
float curr_error_store = r.error_r;
float curr_time_store = r.time_r;
time_doc[tindex] = curr_time_store;
distance_doc[tindex] = ex_dist;
PID_doc[tindex] = u_store;
error_doc[tindex] = curr_error_store;
if (u_store > 0){
PID_backward(u_store, tindex);
}else if (u_store < 0){
PID_forward(u_store, tindex);
}
tindex++;
}
This way, when the ToF sensor returns with data, the PID calculates and appends motor inputs as usual. In the interval between each reading, the PID loop executes control of the car based on our linear extrapolation algorithm. This runs much faster than relying purely on ToF data.
References
I took reference from Jennie Redrovan’s lab report, and I worked briefly with Apurva Hanwadikar.