LAB 7 - MAE4190 FAST ROBOTS
Welcome to lab 7 of fast robots! In this lab we will be implementing the Kalman filter on our car controls.
Lab Tasks
In order to implement a Kalman Filter, we will first be needing a state space model of the car.
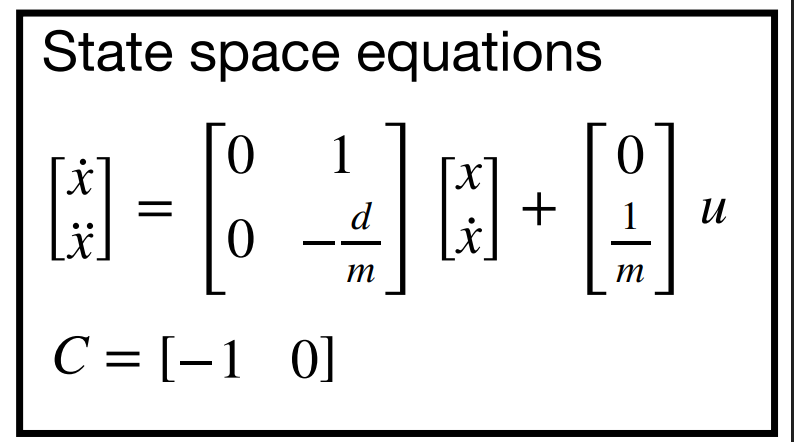
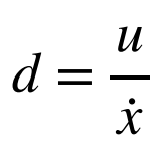
To get the estimates for our A and B matrices, we will therefore need the car’s drag and momentum.
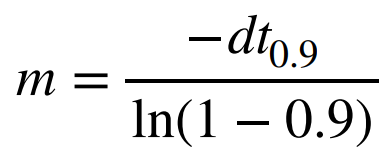
Testing for Drag and Momentum
Using a step response and giving the motors a constant input, I obtained ToF sensor data with which I calculated velocity to plot against time. From the plots I obtained the steady state velocity and 90% rise time for the d and m calculations:
to be of similar size to the PWM value you used in Lab 5 (to keep the dynamics similar). Pick something between 50%-100% of the maximum u.
unfortunately at this point one of my motor drivers broke, so I will submit the videos and testing later during break on someone else’s car